问题转化
最大化最小值,考虑二分答案,即二分距离的下界 $\textit{low}$。为什么?因为 $\textit{low}$ 越大,可以选的点越少,有单调性。

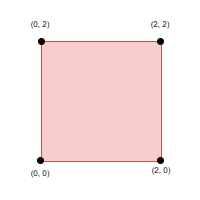
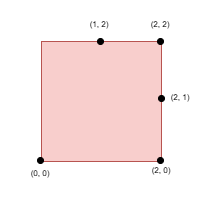
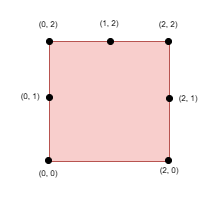
把正方形拉成一条线,示例 2 按照左边界、上边界、右边界、下边界的顺时针顺序,这 $5$ 个点在一维上的坐标为
$$
a=[0,3,4,5,6]
$$
现在问题变成:
- 能否在数组 $a$ 中选 $k$ 个数,要求任意两个相邻元素相差至少为 $\textit{low}$,且第一个数和最后一个数相差至多为 $\textit{side}\cdot 4 - \textit{low}$。
- $\textit{side}\cdot 4 - \textit{low}$ 是因为 $a$ 是个环形数组,设第一个点为 $x$,最后一个点为 $y$,那么 $y$ 可以视作负方向上的 $y-\textit{side}\cdot 4$,我们要求 $x-(y-\textit{side}\cdot 4) \ge \textit{low}$,解得 $y-x\le \textit{side}\cdot 4 - \textit{low}$。
方法一:二分答案 + 二分查找
枚举第一个数,不断向后二分找相距至少为 $\textit{low}$ 的最近元素,直到找到 $k$ 个数,或者第一个数和最后一个数相差超过 $\textit{side}\cdot 4 - \textit{low}$ 时停止。
⚠注意:本题保证 $k\ge 4$,所以答案不会超过 $\textit{side}$。这也保证了如果下一个点不在正方形的当前边或者下一条边上,那么距离是一定满足要求的,所以「二分找下一个点」的做法是正确的。而 $k\le 3$ 时,答案可能会超过 $\textit{side}$,整体没有单调性(比如左边界上的点,到右边界的距离是先变小再变大),需要分段,每段内部是有单调性的,可以每段二分一次。也就是说,$k\le 3$ 的时候,「二分找下一个点」需要多次二分。
⚠注意:不需要找一圈后又绕回到数组 $a$ 的开头继续找。设 $\textit{start}$ 是第一个点,$p$ 是二分找到的最后一个点(绕回到数组开头找到的 $p$)。反证:假设从 $\textit{start}$ 开始搜比从 $p$ 开始搜更优,那么因为我们要求首尾两个点相距 $\ge \textit{low}$,从 $p$ 开始往后搜,下一个点一定是 $\textit{start}$ 或者 $\textit{start}$ 前面的点,所以从 $p$ 开始搜得到的结果,不会比从 $\textit{start}$ 开始搜更差,矛盾。这也同时意味着,无需把环形数组 $a$ 复制一份。
下面代码采用开区间二分,这仅仅是二分的一种写法,使用闭区间或者半闭半开区间都是可以的。
- 开区间左端点初始值:$1$。一定可以满足要求。
- 开区间右端点初始值:$\textit{side} + 1$。一定无法满足要求。
- 开区间右端点初始值(优化):$\left\lfloor\dfrac{\textit{side}\cdot 4}{k}\right\rfloor + 1$。因为均分周长 $\textit{side}\cdot 4$ 的话,两点相距最小值的最大值是 $\left\lfloor\dfrac{\textit{side}\cdot 4}{k}\right\rfloor$,加一后一定无法满足要求。
答疑
问:为什么需要枚举第一个点是谁?如果从第一个点开始向后二分,没有找到符合要求的 $k$ 个点,那么从第二个点开始向后二分,应该更加不可能找到符合要求的 $k$ 个点呀?
答:比如有 $5$ 个点 $a,b,c,d,e$,我们要选 $k=4$ 个点。假设从 $a$ 开始二分找到的是 $a,c,d,e$,但是点 $a$ 和点 $e$ 太近了。那么继续枚举,假设从 $b$ 开始二分找到的是 $b,c,d,e$,并且 $b$ 和 $e$ 满足要求。这就是一个需要继续枚举的例子,其中 $a$ 离 $b$ 很近,离 $c$ 很远。
###py
class Solution:
def maxDistance(self, side: int, points: List[List[int]], k: int) -> int:
# 正方形边上的点,按照顺时针映射到一维数轴上
a = []
for x, y in points:
if x == 0:
a.append(y)
elif y == side:
a.append(side + x)
elif x == side:
a.append(side * 3 - y)
else:
a.append(side * 4 - x)
a.sort()
def check(low: int) -> bool:
for start in a: # 枚举第一个点
end = start + side * 4 - low
cur = start
for _ in range(k - 1): # 还需要找 k-1 个点
j = bisect_left(a, cur + low)
if j == len(a) or a[j] > end: # 不能离第一个点太近
break
cur = a[j]
else:
return True
return False
left, right = 1, side * 4 // k + 1
while left + 1 < right:
mid = (left + right) // 2
if check(mid):
left = mid
else:
right = mid
return left
###py
class Solution:
def maxDistance(self, side: int, points: List[List[int]], k: int) -> int:
# 正方形边上的点,按照顺时针映射到一维数轴上
a = []
for x, y in points:
if x == 0:
a.append(y)
elif y == side:
a.append(side + x)
elif x == side:
a.append(side * 3 - y)
else:
a.append(side * 4 - x)
a.sort()
def check(low: int) -> bool:
# 如果 low+1 不满足要求,但 low 满足要求,那么答案就是 low
low += 1
for start in a: # 枚举第一个点
end = start + side * 4 - low
cur = start
for _ in range(k - 1): # 还需要找 k-1 个点
j = bisect_left(a, cur + low)
if j == len(a) or a[j] > end: # 不能离第一个点太近
break
cur = a[j]
else:
return False
return True
return bisect_left(range(side * 4 // k), True, key=check)
###java
class Solution {
public int maxDistance(int side, int[][] points, int k) {
// 正方形边上的点,按照顺时针映射到一维数轴上
long[] a = new long[points.length];
for (int i = 0; i < points.length; i++) {
int x = points[i][0];
int y = points[i][1];
if (x == 0) {
a[i] = y;
} else if (y == side) {
a[i] = side + x;
} else if (x == side) {
a[i] = side * 3L - y;
} else {
a[i] = side * 4L - x;
}
}
Arrays.sort(a);
int left = 1;
int right = (int) (side * 4L / k) + 1;
while (left + 1 < right) {
int mid = (left + right) >>> 1;
if (check(a, side, k, mid)) {
left = mid;
} else {
right = mid;
}
}
return left;
}
private boolean check(long[] a, int side, int k, int low) {
next:
for (long start : a) { // 枚举第一个点
long end = start + side * 4L - low;
long cur = start;
for (int i = 0; i < k - 1; i++) { // 还需要找 k-1 个点
int j = lowerBound(a, cur + low);
if (j == a.length || a[j] > end) { // 不能离第一个点太近
continue next;
}
cur = a[j];
}
return true;
}
return false;
}
// 见 https://www.bilibili.com/video/BV1AP41137w7/
private int lowerBound(long[] nums, long target) {
int left = -1;
int right = nums.length;
while (left + 1 < right) {
int mid = (left + right) >>> 1;
if (nums[mid] >= target) {
right = mid;
} else {
left = mid;
}
}
return right;
}
}
###cpp
class Solution {
public:
int maxDistance(int side, vector<vector<int>>& points, int k) {
// 正方形边上的点,按照顺时针映射到一维数轴上
vector<long long> a;
for (auto& p : points) {
int x = p[0], y = p[1];
if (x == 0) {
a.push_back(y);
} else if (y == side) {
a.push_back(side + x);
} else if (x == side) {
a.push_back(side * 3LL - y);
} else {
a.push_back(side * 4LL - x);
}
}
ranges::sort(a);
auto check = [&](int low) -> bool {
for (long long start : a) { // 枚举第一个点
long long end = start + side * 4LL - low;
long long cur = start;
for (int i = 0; i < k - 1; i++) { // 还需要找 k-1 个点
auto it = ranges::lower_bound(a, cur + low);
if (it == a.end() || *it > end) { // 不能离第一个点太近
cur = -1;
break;
}
cur = *it;
}
if (cur >= 0) {
return true;
}
}
return false;
};
int left = 1, right = side * 4LL / k + 1;
while (left + 1 < right) {
int mid = left + (right - left) / 2;
(check(mid) ? left : right) = mid;
}
return left;
}
};
###go
func maxDistance(side int, points [][]int, k int) int {
// 正方形边上的点,按照顺时针映射到一维数轴上
a := make([]int, len(points))
for i, p := range points {
x, y := p[0], p[1]
if x == 0 {
a[i] = y
} else if y == side {
a[i] = side + x
} else if x == side {
a[i] = side*3 - y
} else {
a[i] = side*4 - x
}
}
slices.Sort(a)
ans := sort.Search(side*4/k, func(low int) bool {
// 如果 low+1 不满足要求,但 low 满足要求,那么答案就是 low
low++
next:
for i, start := range a { // 枚举第一个点
cur := start
for range k - 1 { // 还需要找 k-1 个点
i += sort.Search(len(a)-i, func(j int) bool { return a[i+j] >= cur+low })
if i == len(a) || a[i] > start+side*4-low { // 不能离第一个点太近
continue next
}
cur = a[i]
}
return false
}
return true
})
return ans
}
复杂度分析
- 时间复杂度:$\mathcal{O}(nk \log \textit{side}\log n)$,其中 $n$ 是 $\textit{points}$ 的长度。由于中途会退出循环,这个复杂度是跑不满的。
- 空间复杂度:$\mathcal{O}(n)$。
方法二:二分答案 + k 个同向指针
把方法一最内层的二分查找,改用 $k$ 个指针维护。
一开始,初始化一个长为 $k$ 的 $\textit{idx}$ 数组,初始值 $\textit{idx}[j]=0$。
然后写个 $k$ 指针(双指针的推广):
- 遍历 $j=1,2,3,\ldots,k-1$,如果发现 $a[\textit{idx}[j]] < a[\textit{idx}[j-1]] + \textit{low}$,就不断把 $\textit{idx}[j]$ 加一直到不满足条件。如果 $\textit{idx}[j]=n$ 则返回。
- 这些指针移动后,如果首尾两个指针指向的数相差不超过 $\textit{side}\cdot 4 - \textit{low}$,则返回。
- 否则把 $\textit{idx}[0]$ 加一,继续循环。
优化前
###py
class Solution:
def maxDistance(self, side: int, points: List[List[int]], k: int) -> int:
a = []
for x, y in points:
if x == 0:
a.append(y)
elif y == side:
a.append(side + x)
elif x == side:
a.append(side * 3 - y)
else:
a.append(side * 4 - x)
a.sort()
def check(low: int) -> bool:
idx = [0] * k
while True:
for j in range(1, k):
while a[idx[j]] < a[idx[j - 1]] + low:
idx[j] += 1
if idx[j] == len(a):
return False
if a[idx[-1]] - a[idx[0]] <= side * 4 - low:
return True
idx[0] += 1
left, right = 1, side * 4 // k + 1
while left + 1 < right:
mid = (left + right) // 2
if check(mid):
left = mid
else:
right = mid
return left
###java
class Solution {
public int maxDistance(int side, int[][] points, int k) {
long[] a = new long[points.length];
for (int i = 0; i < points.length; i++) {
int x = points[i][0];
int y = points[i][1];
if (x == 0) {
a[i] = y;
} else if (y == side) {
a[i] = side + x;
} else if (x == side) {
a[i] = side * 3L - y;
} else {
a[i] = side * 4L - x;
}
}
Arrays.sort(a);
int left = 1;
int right = (int) (side * 4L / k) + 1;
while (left + 1 < right) {
int mid = (left + right) >>> 1;
if (check(a, side, k, mid)) {
left = mid;
} else {
right = mid;
}
}
return left;
}
private boolean check(long[] a, int side, int k, int low) {
int[] idx = new int[k];
while (true) {
for (int j = 1; j < k; j++) {
while (a[idx[j]] < a[idx[j - 1]] + low) {
idx[j]++;
if (idx[j] == a.length) {
return false;
}
}
}
if (a[idx[k - 1]] - a[idx[0]] <= side * 4L - low) {
return true;
}
idx[0]++;
}
}
}
###cpp
class Solution {
public:
int maxDistance(int side, vector<vector<int>>& points, int k) {
// 正方形边上的点,按照顺时针映射到一维数轴上
vector<long long> a;
for (auto& p : points) {
int x = p[0], y = p[1];
if (x == 0) {
a.push_back(y);
} else if (y == side) {
a.push_back(side + x);
} else if (x == side) {
a.push_back(side * 3LL - y);
} else {
a.push_back(side * 4LL - x);
}
}
ranges::sort(a);
auto check = [&](int low) -> bool {
vector<int> idx(k);
while (true) {
for (int j = 1; j < k; j++) {
while (a[idx[j]] < a[idx[j - 1]] + low) {
idx[j]++;
if (idx[j] == a.size()) {
return false;
}
}
}
if (a[idx[k - 1]] - a[idx[0]] <= side * 4LL - low) {
return true;
}
idx[0]++;
}
};
// 本题保证 k >= 4,所以最远距离不会超过 side
int left = 1, right = side * 4LL / k + 1;
while (left + 1 < right) {
int mid = left + (right - left) / 2;
(check(mid) ? left : right) = mid;
}
return left;
}
};
###go
func maxDistance(side int, points [][]int, k int) int {
a := make([]int, len(points))
for i, p := range points {
x, y := p[0], p[1]
if x == 0 {
a[i] = y
} else if y == side {
a[i] = side + x
} else if x == side {
a[i] = side*3 - y
} else {
a[i] = side*4 - x
}
}
slices.Sort(a)
ans := sort.Search(side*4/k, func(low int) bool {
low++
idx := make([]int, k)
for {
for j := 1; j < k; j++ {
for a[idx[j]] < a[idx[j-1]]+low {
idx[j]++
if idx[j] == len(a) {
return true
}
}
}
if a[idx[k-1]]-a[idx[0]] <= side*4-low {
return false
}
idx[0]++
}
})
return ans
}
优化
把从 $\textit{start}=a[0]$ 开始向后二分得到的 $k$ 个下标,记到 $\textit{idx}$ 数组中。如果没有 $k$ 个下标,直接返回。
这样初始化比从 $0$ 开始一个一个地向后移动指针更快。
此外,第一个指针至多移动到第二个指针的初始位置,就不用继续枚举了,后面必然无法得到符合要求的结果。
###py
class Solution:
def maxDistance(self, side: int, points: List[List[int]], k: int) -> int:
a = []
for x, y in points:
if x == 0:
a.append(y)
elif y == side:
a.append(side + x)
elif x == side:
a.append(side * 3 - y)
else:
a.append(side * 4 - x)
a.sort()
def check(low: int) -> bool:
idx = [0] * k
cur = a[0]
for j in range(1, k):
i = bisect_left(a, cur + low)
if i == len(a):
return False
idx[j] = i
cur = a[i]
if cur - a[0] <= side * 4 - low:
return True
# 第一个指针移动到第二个指针的位置,就不用继续枚举了
for idx[0] in range(1, idx[1]):
for j in range(1, k):
while a[idx[j]] < a[idx[j - 1]] + low:
idx[j] += 1
if idx[j] == len(a):
return False
if a[idx[-1]] - a[idx[0]] <= side * 4 - low:
return True
return False
left, right = 1, side * 4 // k + 1
while left + 1 < right:
mid = (left + right) // 2
if check(mid):
left = mid
else:
right = mid
return left
###java
class Solution {
public int maxDistance(int side, int[][] points, int k) {
long[] a = new long[points.length];
for (int i = 0; i < points.length; i++) {
int x = points[i][0];
int y = points[i][1];
if (x == 0) {
a[i] = y;
} else if (y == side) {
a[i] = side + x;
} else if (x == side) {
a[i] = side * 3L - y;
} else {
a[i] = side * 4L - x;
}
}
Arrays.sort(a);
int left = 1;
int right = (int) (side * 4L / k) + 1;
while (left + 1 < right) {
int mid = (left + right) >>> 1;
if (check(a, side, k, mid)) {
left = mid;
} else {
right = mid;
}
}
return left;
}
private boolean check(long[] a, int side, int k, int low) {
int[] idx = new int[k];
long cur = a[0];
for (int j = 1; j < k; j++) {
int i = lowerBound(a, cur + low);
if (i == a.length) {
return false;
}
idx[j] = i;
cur = a[i];
}
if (cur - a[0] <= side * 4L - low) {
return true;
}
// 第一个指针移动到第二个指针的位置,就不用继续枚举了
int end0 = idx[1];
for (idx[0] = 1; idx[0] < end0; idx[0]++) {
for (int j = 1; j < k; j++) {
while (a[idx[j]] < a[idx[j - 1]] + low) {
idx[j]++;
if (idx[j] == a.length) {
return false;
}
}
}
if (a[idx[k - 1]] - a[idx[0]] <= side * 4L - low) {
return true;
}
}
return false;
}
// 见 https://www.bilibili.com/video/BV1AP41137w7/
private int lowerBound(long[] nums, long target) {
int left = -1;
int right = nums.length;
while (left + 1 < right) {
int mid = (left + right) >>> 1;
if (nums[mid] >= target) {
right = mid;
} else {
left = mid;
}
}
return right;
}
}
###cpp
class Solution {
public:
int maxDistance(int side, vector<vector<int>>& points, int k) {
vector<long long> a;
for (auto& p : points) {
int x = p[0], y = p[1];
if (x == 0) {
a.push_back(y);
} else if (y == side) {
a.push_back(side + x);
} else if (x == side) {
a.push_back(side * 3LL - y);
} else {
a.push_back(side * 4LL - x);
}
}
ranges::sort(a);
auto check = [&](int low) -> bool {
vector<int> idx(k);
long long cur = a[0];
for (int j = 1; j < k; j++) {
int i = ranges::lower_bound(a, cur + low) - a.begin();
if (i == a.size()) {
return false;
}
idx[j] = i;
cur = a[i];
}
if (cur - a[0] <= side * 4LL - low) {
return true;
}
// 第一个指针移动到第二个指针的位置,就不用继续枚举了
int end0 = idx[1];
for (idx[0]++; idx[0] < end0; idx[0]++) {
for (int j = 1; j < k; j++) {
while (a[idx[j]] < a[idx[j - 1]] + low) {
idx[j]++;
if (idx[j] == a.size()) {
return false;
}
}
}
if (a[idx[k - 1]] - a[idx[0]] <= side * 4LL - low) {
return true;
}
}
return false;
};
int left = 1, right = side * 4LL / k + 1;
while (left + 1 < right) {
int mid = left + (right - left) / 2;
(check(mid) ? left : right) = mid;
}
return left;
}
};
###go
func maxDistance(side int, points [][]int, k int) int {
a := make([]int, len(points))
for i, p := range points {
x, y := p[0], p[1]
if x == 0 {
a[i] = y
} else if y == side {
a[i] = side + x
} else if x == side {
a[i] = side*3 - y
} else {
a[i] = side*4 - x
}
}
slices.Sort(a)
ans := sort.Search(side*4/k, func(low int) bool {
low++
idx := make([]int, k)
cur := a[0]
for j, i := 1, 0; j < k; j++ {
i += sort.Search(len(a)-i, func(j int) bool { return a[i+j] >= cur+low })
if i == len(a) {
return true
}
idx[j] = i
cur = a[i]
}
if cur-a[0] <= side*4-low {
return false
}
// 第一个指针移动到第二个指针的位置,就不用继续枚举了
end0 := idx[1]
for idx[0]++; idx[0] < end0; idx[0]++ {
for j := 1; j < k; j++ {
for a[idx[j]] < a[idx[j-1]]+low {
idx[j]++
if idx[j] == len(a) {
return true
}
}
}
if a[idx[k-1]]-a[idx[0]] <= side*4-low {
return false
}
}
return true
})
return ans
}
复杂度分析
- 时间复杂度:$\mathcal{O}(n\log n + nk \log \textit{side})$,其中 $n$ 是 $\textit{points}$ 的长度。其中 $\mathcal{O}(n\log n)$ 是排序的时间复杂度。
- 空间复杂度:$\mathcal{O}(n)$。
方法三:二分答案 + 倍增
如果 $k$ 更大,上面两个方法就超时了。怎么办?
前置知识:倍增讲解。
在二分中,先预处理 $\textit{nxt}[i][0] = j$ 表示距离 $a[i]$ 至少为 $\textit{low}$ 的下一个点的下标是 $j$。如果不存在则 $j=n$。这可以用双指针计算。
然后倍增,定义 $\textit{nxt}[i][l]$ 表示 $i$ 的下 $2^l$ 个点的下标是 $\textit{nxt}[i][l]$。例如 $\textit{nxt}[i][1]$ 表示 $i$ 的下下个点的下标是 $\textit{nxt}[i][1]$。
转移方程同上面的倍增讲解:
$$
\textit{nxt}[i][l] = \textit{nxt}[\textit{nxt}[i][l-1]][l-1]
$$
可以定义 $\textit{nxt}[n][l]=n$ 作为哨兵,简化代码。
然后枚举 $i=0,1,2,\cdots$,往后跳 $k-1$ 步,得到下标 $j$。如果
$$
a[j] - a[i] \le \textit{side}\cdot 4 - \textit{low}
$$
成立,则说明可以找到符合要求的 $k$ 个点。
###py
class Solution:
def maxDistance(self, side: int, points: List[List[int]], k: int) -> int:
a = []
for x, y in points:
if x == 0:
a.append(y)
elif y == side:
a.append(side + x)
elif x == side:
a.append(side * 3 - y)
else:
a.append(side * 4 - x)
a.sort()
n = len(a)
k -= 1 # 往后跳 k-1 步,这里先减一,方便计算
mx = k.bit_length()
nxt = [[n] * mx for _ in range(n + 1)]
def check(low: int) -> bool:
# 预处理倍增数组 nxt
j = n
for i in range(n - 1, -1, -1): # 转移来源在右边,要倒序计算
while a[j - 1] >= a[i] + low:
j -= 1
nxt[i][0] = j
for l in range(1, mx):
nxt[i][l] = nxt[nxt[i][l - 1]][l - 1]
# 枚举起点
for i, start in enumerate(a):
# 往后跳 k-1 步(注意上面把 k 减一了)
cur = i
for j in range(mx - 1, -1, -1):
if k >> j & 1:
cur = nxt[cur][j]
if cur == n: # 出界
break
if a[cur] - start <= side * 4 - low:
return True
return False
left, right = 1, side * 4 // k + 1
while left + 1 < right:
mid = (left + right) // 2
if check(mid):
left = mid
else:
right = mid
return left
###java
class Solution {
public int maxDistance(int side, int[][] points, int k) {
int n = points.length;
long[] a = new long[n];
for (int i = 0; i < n; i++) {
int x = points[i][0];
int y = points[i][1];
if (x == 0) {
a[i] = y;
} else if (y == side) {
a[i] = side + x;
} else if (x == side) {
a[i] = side * 3L - y;
} else {
a[i] = side * 4L - x;
}
}
Arrays.sort(a);
k--; // 往后跳 k-1 步,这里先减一,方便计算
int mx = 32 - Integer.numberOfLeadingZeros(k);
int[][] nxt = new int[n + 1][mx];
Arrays.fill(nxt[n], n); // 哨兵
int left = 1;
int right = (int) (side * 4L / k) + 1;
while (left + 1 < right) {
int mid = (left + right) >>> 1;
if (check(a, side, k, nxt, mid)) {
left = mid;
} else {
right = mid;
}
}
return left;
}
private boolean check(long[] a, int side, int k, int[][] nxt, int low) {
int n = a.length;
int mx = nxt[0].length;
// 预处理倍增数组 nxt
for (int i = n - 1, j = n; i >= 0; i--) {
while (a[j - 1] >= a[i] + low) {
j--;
}
nxt[i][0] = j;
for (int l = 1; l < mx; l++) {
nxt[i][l] = nxt[nxt[i][l - 1]][l - 1];
}
}
// 枚举起点
for (int i = 0; i < n; i++) {
int cur = i;
// 往后跳 k-1 步(注意上面把 k 减一了)
for (int j = mx - 1; j >= 0; j--) {
if ((k >> j & 1) > 0) {
cur = nxt[cur][j];
}
}
if (cur == n) { // 出界
break;
}
if (a[cur] - a[i] <= side * 4L - low) {
return true;
}
}
return false;
}
}
###cpp
class Solution {
public:
int maxDistance(int side, vector<vector<int>>& points, int k) {
vector<long long> a;
for (auto& p : points) {
int x = p[0], y = p[1];
if (x == 0) {
a.push_back(y);
} else if (y == side) {
a.push_back(side + x);
} else if (x == side) {
a.push_back(side * 3LL - y);
} else {
a.push_back(side * 4LL - x);
}
}
ranges::sort(a);
int n = a.size();
k--; // 往后跳 k-1 步,这里先减一,方便计算
int high_bit = bit_width((unsigned) k) - 1;
vector<array<int, 5>> nxt(n + 1); // 5 可以改为 high_bit+1(这里用 array 而不是 vector,提高访问效率)
ranges::fill(nxt[n], n); // 哨兵
auto check = [&](int low) -> bool {
// 预处理倍增数组 nxt
int j = n;
for (int i = n - 1; i >= 0; i--) { // 转移来源在右边,要倒序计算
while (a[j - 1] >= a[i] + low) {
j--;
}
nxt[i][0] = j;
for (int k = 1; k <= high_bit; k++) {
nxt[i][k] = nxt[nxt[i][k - 1]][k - 1];
}
}
// 枚举起点
for (int i = 0; i < n; i++) {
int cur = i;
// 往后跳 k-1 步(注意上面把 k 减一了)
for (int j = high_bit; j >= 0; j--) {
if (k >> j & 1) {
cur = nxt[cur][j];
}
}
if (cur == n) { // 出界
break;
}
if (a[cur] - a[i] <= side * 4LL - low) {
return true;
}
}
return false;
};
int left = 1, right = side * 4LL / k + 1;
while (left + 1 < right) {
int mid = left + (right - left) / 2;
(check(mid) ? left : right) = mid;
}
return left;
}
};
###go
func maxDistance(side int, points [][]int, k int) int {
n := len(points)
a := make([]int, n)
for i, p := range points {
x, y := p[0], p[1]
if x == 0 {
a[i] = y
} else if y == side {
a[i] = side + x
} else if x == side {
a[i] = side*3 - y
} else {
a[i] = side*4 - x
}
}
slices.Sort(a)
k-- // 往后跳 k-1 步,这里先减一,方便计算
highBit := bits.Len(uint(k)) - 1
nxt := make([][5]int, n+1) // 5 可以改为 highBit+1(用 array 而不是 slice,提高访问效率)
for j := range nxt[n] {
nxt[n][j] = n // 哨兵
}
ans := sort.Search(side*4/k, func(low int) bool {
low++
// 预处理倍增数组 nxt
j := n
for i := n - 1; i >= 0; i-- { // 转移来源在右边,要倒序计算
for a[j-1] >= a[i]+low {
j--
}
nxt[i][0] = j
for k := 1; k <= highBit; k++ {
nxt[i][k] = nxt[nxt[i][k-1]][k-1]
}
}
// 枚举起点
for i, start := range a {
// 往后跳 k-1 步(注意上面把 k 减一了)
cur := i
for j := highBit; j >= 0; j-- {
if k>>j&1 > 0 {
cur = nxt[cur][j]
}
}
if cur == n { // 出界
break
}
if a[cur]-start <= side*4-low {
return false
}
}
return true
})
return ans
}
复杂度分析
- 时间复杂度:$\mathcal{O}(n\log n + n\log k \log \textit{side})$,其中 $n$ 是 $\textit{points}$ 的长度。其中 $\mathcal{O}(n\log n)$ 是排序的时间复杂度。
- 空间复杂度:$\mathcal{O}(n\log k)$。
方法四:二分答案 + 建树 + DFS
在方法三的双指针基础上,连一条从 $j$ 到 $i$ 的有向边,我们会得到一棵有向树,根是 $n$。
从 $n$ 开始递归这棵树,同时用一个栈记录从根到当前节点的 $a[x]$ 信息。
当栈中有 $k$ 个点时,记录栈中倒数第 $k$ 个数和栈顶的距离,如果 $\le \textit{side}\cdot 4 - \textit{low}$,则找到了满足要求的 $k$ 的点,结束递归。
⚠注意:无需判断 $f[i]>k$ 的情况,因为这意味着之前栈中有 $k$ 个点的时候,首尾两点间的距离足够远(甚至还可以再容纳一个点),一定满足要求。
###py
class Solution:
def maxDistance(self, side: int, points: List[List[int]], k: int) -> int:
a = []
for x, y in points:
if x == 0:
a.append(y)
elif y == side:
a.append(side + x)
elif x == side:
a.append(side * 3 - y)
else:
a.append(side * 4 - x)
a.sort()
n = len(a)
a.append(inf) # 哨兵
def check(low: int) -> bool:
g = [[] for _ in range(n + 1)]
j = n
for i in range(n - 1, -1, -1):
while a[j - 1] >= a[i] + low:
j -= 1
g[j].append(i) # 建树
st = []
def dfs(x: int) -> bool:
st.append(a[x])
# 注意栈中多了一个 a[n],所以是 m > k 不是 ==
if len(st) > k and st[-k] - a[x] <= side * 4 - low:
return True
for y in g[x]:
if dfs(y):
return True
st.pop() # 恢复现场
return False
return dfs(n)
left, right = 1, side * 4 // k + 1
while left + 1 < right:
mid = (left + right) // 2
if check(mid):
left = mid
else:
right = mid
return left
###java
class Solution {
public int maxDistance(int side, int[][] points, int k) {
int n = points.length;
long[] a = new long[n + 1];
for (int i = 0; i < n; i++) {
int x = points[i][0];
int y = points[i][1];
if (x == 0) {
a[i] = y;
} else if (y == side) {
a[i] = side + x;
} else if (x == side) {
a[i] = side * 3L - y;
} else {
a[i] = side * 4L - x;
}
}
a[n] = Long.MAX_VALUE; // 哨兵
Arrays.sort(a);
int left = 1;
int right = (int) (side * 4L / k) + 1;
while (left + 1 < right) {
int mid = (left + right) >>> 1;
if (check(a, side, k, mid)) {
left = mid;
} else {
right = mid;
}
}
return left;
}
private boolean check(long[] a, int side, int k, int low) {
int n = a.length - 1;
List<Integer>[] g = new ArrayList[n + 1];
Arrays.setAll(g, i -> new ArrayList<>());
for (int i = n - 1, j = n; i >= 0; i--) {
while (a[j - 1] >= a[i] + low) {
j--;
}
g[j].add(i); // 建树
}
List<Long> st = new ArrayList<>();
return dfs(a, g, st, k, side * 4L - low, n);
}
private boolean dfs(long[] a, List<Integer>[] g, List<Long> st, int k, long limit, int x) {
st.add(a[x]);
int m = st.size();
// 注意栈中多了一个 a[n],所以是 m > k 不是 ==
if (m > k && st.get(m - k) - a[x] <= limit) {
return true;
}
for (int y : g[x]) {
if (dfs(a, g, st, k, limit, y)) {
return true;
}
}
st.remove(m - 1); // 恢复现场
return false;
}
}
###cpp
class Solution {
public:
int maxDistance(int side, vector<vector<int>>& points, int k) {
vector<long long> a;
for (auto& p : points) {
int x = p[0], y = p[1];
if (x == 0) {
a.push_back(y);
} else if (y == side) {
a.push_back(side + x);
} else if (x == side) {
a.push_back(side * 3LL - y);
} else {
a.push_back(side * 4LL - x);
}
}
ranges::sort(a);
int n = a.size();
a.push_back(LLONG_MAX); // 哨兵
auto check = [&](int low) -> bool {
vector<vector<int>> g(n + 1);
int j = n;
for (int i = n - 1; i >= 0; i--) {
while (a[j - 1] >= a[i] + low) {
j--;
}
g[j].push_back(i); // 建树
}
vector<long long> st;
auto dfs = [&](this auto&& dfs, int x) -> bool {
st.push_back(a[x]);
int m = st.size();
// 注意栈中多了一个 a[n],所以是 m > k 不是 ==
if (m > k && st[m - k] - a[x] <= side * 4LL - low) {
return true;
}
for (int y : g[x]) {
if (dfs(y)) {
return true;
}
}
st.pop_back(); // 恢复现场
return false;
};
return dfs(n);
};
int left = 1, right = side * 4LL / k + 1;
while (left + 1 < right) {
int mid = left + (right - left) / 2;
(check(mid) ? left : right) = mid;
}
return left;
}
};
###go
func maxDistance(side int, points [][]int, k int) int {
n := len(points)
a := make([]int, n, n+1)
for i, p := range points {
x, y := p[0], p[1]
if x == 0 {
a[i] = y
} else if y == side {
a[i] = side + x
} else if x == side {
a[i] = side*3 - y
} else {
a[i] = side*4 - x
}
}
slices.Sort(a)
a = append(a, math.MaxInt) // 哨兵
g := make([][]int, n+1)
ans := sort.Search(side*4/k, func(low int) bool {
low++
clear(g)
j := n
for i := n - 1; i >= 0; i-- {
for a[j-1] >= a[i]+low {
j--
}
g[j] = append(g[j], i) // 建树
}
st := []int{}
var dfs func(int) bool
dfs = func(x int) bool {
st = append(st, a[x])
m := len(st)
// 注意栈中多了一个 a[n],所以是 m > k 不是 ==
if m > k && st[m-k]-a[x] <= side*4-low {
return true
}
for _, y := range g[x] {
if dfs(y) {
return true
}
}
st = st[:m-1] // 恢复现场
return false
}
return !dfs(n)
})
return ans
}
复杂度分析
- 时间复杂度:$\mathcal{O}(n\log n + n\log \textit{side})$,其中 $n$ 是 $\textit{points}$ 的长度。其中 $\mathcal{O}(n\log n)$ 是排序的时间复杂度。每次二分的时间为 $\mathcal{O}(n)$。
- 空间复杂度:$\mathcal{O}(n)$。
方法五:二分 + 动态规划
定义 $f[i]$ 表示从 $i$ 往后找,最多可以找多少个点(包含 $i$)。
设下一个点的下标为 $j$,那么有
$$
f[i] = f[j] + 1
$$
初始值 $f[n] = 0$。
此外,定义 $\textit{end}[i]$ 表示从 $i$ 往后找,最后一个点的下标。
- 如果 $f[i]=1$,那么 $\textit{end}[i]$ 就是 $i$ 自己。
- 如果 $f[i]>1$,那么 $\textit{end}[i]$ 是从 $j$ 往后找,最后一个点的下标,即 $\textit{end}[j]$。
所以有
$$
\textit{end}[i] =
\begin{cases}
i, & f[i]=1 \
\textit{end}[j], & f[i]>1 \
\end{cases}
$$
如果 $f[i]=k$,且首尾两点的距离 $a[\textit{end}[i]] - a[i] \le \textit{side}\cdot 4 - \textit{low}$,那么满足要求,返回。
⚠注意:无需判断 $f[i]>k$ 的情况。证明:每次间隔至少 $\textit{low}$ 才会把 $f[i]$ 加 $1$,如果出现 $f[i]=f[j]+1=k+1$ 的情况,说明我们在 $f[j]=k$ 的基础上增加了一个点,对于 $f[j]$ 来说,首尾节点有足够的间距(比 $\textit{low}$ 还大),使得我们可以再加一个点进来,得到 $f[i]=k+1$。所以 $f[j]=k$ 的时候必然可以满足要求,我们不会继续循环到 $f[i]=k+1$ 的情况。
###py
class Solution:
def maxDistance(self, side: int, points: List[List[int]], k: int) -> int:
a = []
for x, y in points:
if x == 0:
a.append(y)
elif y == side:
a.append(side + x)
elif x == side:
a.append(side * 3 - y)
else:
a.append(side * 4 - x)
a.sort()
n = len(a)
f = [0] * (n + 1)
end = [0] * n
def check(low: int) -> bool:
j = n
for i in range(n - 1, -1, -1):
while a[j - 1] >= a[i] + low:
j -= 1
f[i] = f[j] + 1
end[i] = end[j] if f[i] > 1 else i
if f[i] == k and a[end[i]] - a[i] <= side * 4 - low:
return True
return False
left, right = 1, side * 4 // k + 1
while left + 1 < right:
mid = (left + right) // 2
if check(mid):
left = mid
else:
right = mid
return left
###java
class Solution {
public int maxDistance(int side, int[][] points, int k) {
int n = points.length;
long[] a = new long[n];
for (int i = 0; i < n; i++) {
int x = points[i][0];
int y = points[i][1];
if (x == 0) {
a[i] = y;
} else if (y == side) {
a[i] = side + x;
} else if (x == side) {
a[i] = side * 3L - y;
} else {
a[i] = side * 4L - x;
}
}
Arrays.sort(a);
int[] f = new int[n + 1];
int[] end = new int[n];
int left = 1;
int right = (int) (side * 4L / k) + 1;
while (left + 1 < right) {
int mid = (left + right) >>> 1;
if (check(a, side, k, mid, f, end)) {
left = mid;
} else {
right = mid;
}
}
return left;
}
private boolean check(long[] a, int side, int k, int low, int[] f, int[] end) {
int n = a.length;
for (int i = n - 1, j = n; i >= 0; i--) {
while (a[j - 1] >= a[i] + low) {
j--;
}
f[i] = f[j] + 1;
end[i] = f[i] > 1 ? end[j] : i;
if (f[i] == k && a[end[i]] - a[i] <= side * 4L - low) {
return true;
}
}
return false;
}
}
###cpp
class Solution {
public:
int maxDistance(int side, vector<vector<int>>& points, int k) {
vector<long long> a;
for (auto& p : points) {
int x = p[0], y = p[1];
if (x == 0) {
a.push_back(y);
} else if (y == side) {
a.push_back(side + x);
} else if (x == side) {
a.push_back(side * 3LL - y);
} else {
a.push_back(side * 4LL - x);
}
}
ranges::sort(a);
int n = a.size();
vector<int> f(n + 1), end(n);
auto check = [&](int low) -> bool {
int j = n;
for (int i = n - 1; i >= 0; i--) {
while (a[j - 1] >= a[i] + low) {
j--;
}
f[i] = f[j] + 1;
end[i] = f[i] > 1 ? end[j] : i;
if (f[i] == k && a[end[i]] - a[i] <= side * 4LL - low) {
return true;
}
}
return false;
};
int left = 1, right = side * 4LL / k + 1;
while (left + 1 < right) {
int mid = left + (right - left) / 2;
(check(mid) ? left : right) = mid;
}
return left;
}
};
###go
func maxDistance(side int, points [][]int, k int) int {
n := len(points)
a := make([]int, n)
for i, p := range points {
x, y := p[0], p[1]
if x == 0 {
a[i] = y
} else if y == side {
a[i] = side + x
} else if x == side {
a[i] = side*3 - y
} else {
a[i] = side*4 - x
}
}
slices.Sort(a)
f := make([]int, n+1)
end := make([]int, n)
ans := sort.Search(side*4/k, func(low int) bool {
low++
j := n
for i := n - 1; i >= 0; i-- {
for a[j-1] >= a[i]+low {
j--
}
f[i] = f[j] + 1
if f[i] == 1 {
end[i] = i // i 自己就是最后一个点
} else {
end[i] = end[j]
}
if f[i] == k && a[end[i]]-a[i] <= side*4-low {
return false
}
}
return true
})
return ans
}
复杂度分析
- 时间复杂度:$\mathcal{O}(n\log n + n\log \textit{side})$,其中 $n$ 是 $\textit{points}$ 的长度。其中 $\mathcal{O}(n\log n)$ 是排序的时间复杂度。每次二分的时间为 $\mathcal{O}(n)$。
- 空间复杂度:$\mathcal{O}(n)$。
分类题单
如何科学刷题?
- 滑动窗口与双指针(定长/不定长/单序列/双序列/三指针/分组循环)
- 【本题相关】二分算法(二分答案/最小化最大值/最大化最小值/第K小)
- 单调栈(基础/矩形面积/贡献法/最小字典序)
- 网格图(DFS/BFS/综合应用)
- 位运算(基础/性质/拆位/试填/恒等式/思维)
- 图论算法(DFS/BFS/拓扑排序/最短路/最小生成树/二分图/基环树/欧拉路径)
- 动态规划(入门/背包/状态机/划分/区间/状压/数位/数据结构优化/树形/博弈/概率期望)
- 常用数据结构(前缀和/差分/栈/队列/堆/字典树/并查集/树状数组/线段树)
- 数学算法(数论/组合/概率期望/博弈/计算几何/随机算法)
- 贪心与思维(基本贪心策略/反悔/区间/字典序/数学/思维/脑筋急转弯/构造)
- 链表、二叉树与回溯(前后指针/快慢指针/DFS/BFS/直径/LCA/一般树)
- 字符串(KMP/Z函数/Manacher/字符串哈希/AC自动机/后缀数组/子序列自动机)
我的题解精选(已分类)











































 周末也值得一看的新闻
周末也值得一看的新闻
 Hugging Face: huggingface.co/collections/deepseek-ai/deepseek-v4
Hugging Face: huggingface.co/collections/deepseek-ai/deepseek-v4 相关阅读:
相关阅读:















 是周末啊!
是周末啊!